고정 헤더 영역
상세 컨텐츠
본문

* 작성자 : 15기 최민경
본 포스팅은 Youtube 김성범 교수님의 ARIMA 모델 - Part6 강의를 참고하여 작성되었습니다.
<복습>
Q1. AR모델도 white noise의 linear combination으로 표현이 가능하다. (O/X)
A. O
Q2. ARMA모델도 white noise의 linear combination으로 표현이 가능하다. (O/X)
A. O
Q3. white noise인

0
0, 시점이 다른 확률변수는 서로 독립
0
Prediction(Forecasting)
Given
min
-> MSE 최소화하는
즉,
-> conditional expectation
1. AR(1)
Q. 여기서
A. constant term
Q. 그렇다면
A.
-> 점추정(point estimation)
prediction interval
Q. prediction interval과 confidence interval의 차이점은 무엇일까?
A. confidence interval은 population의 mean값의 confidence를 주는 것이고, prediction interval은 모델에 대해 새로운 데이터가 가지게 될 예측값의 confidence를 주는 것. Prediction interval은 mean값과 달리 point값을 예측하는 것이기 때문에 큰 uncertainty를 포함하고 있어 confidence interval에 비해 interval이 더 넓게 나타난다.

정리해보면,
AR(1) model's point estimation =
prediction interval =

2. AR(2)
- point predicted value :
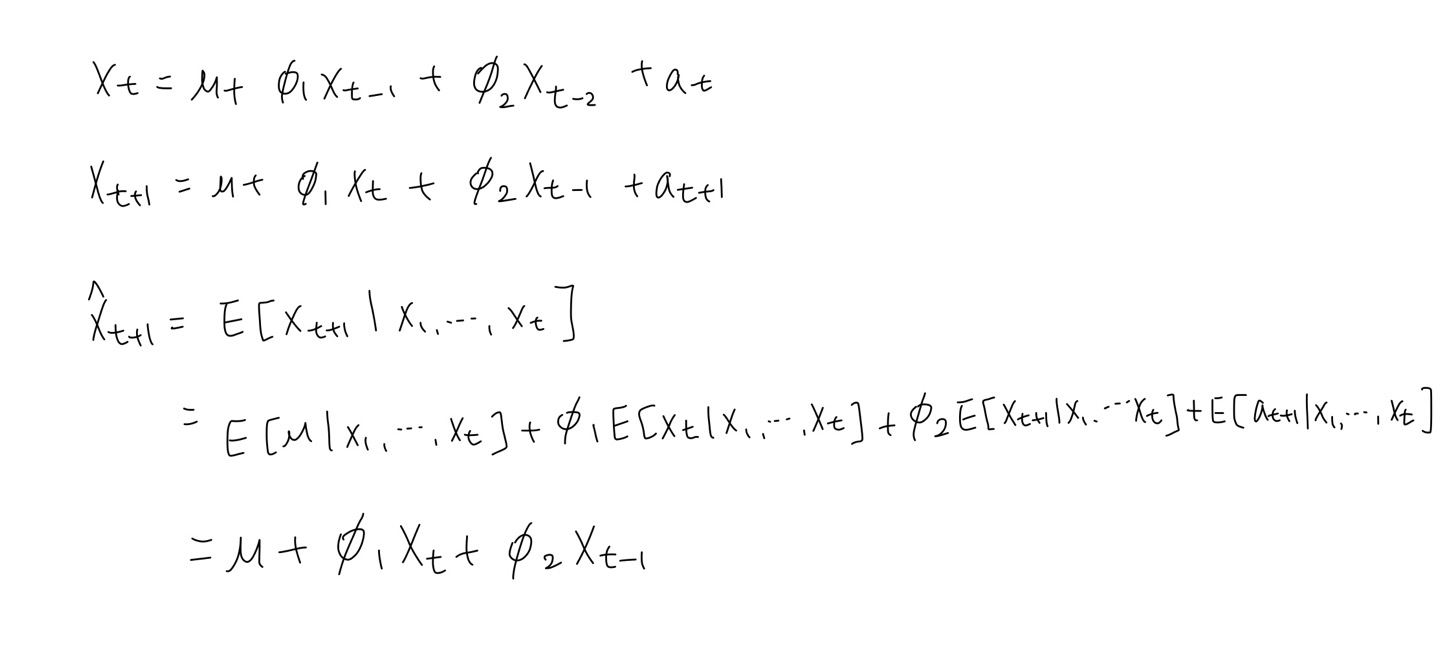
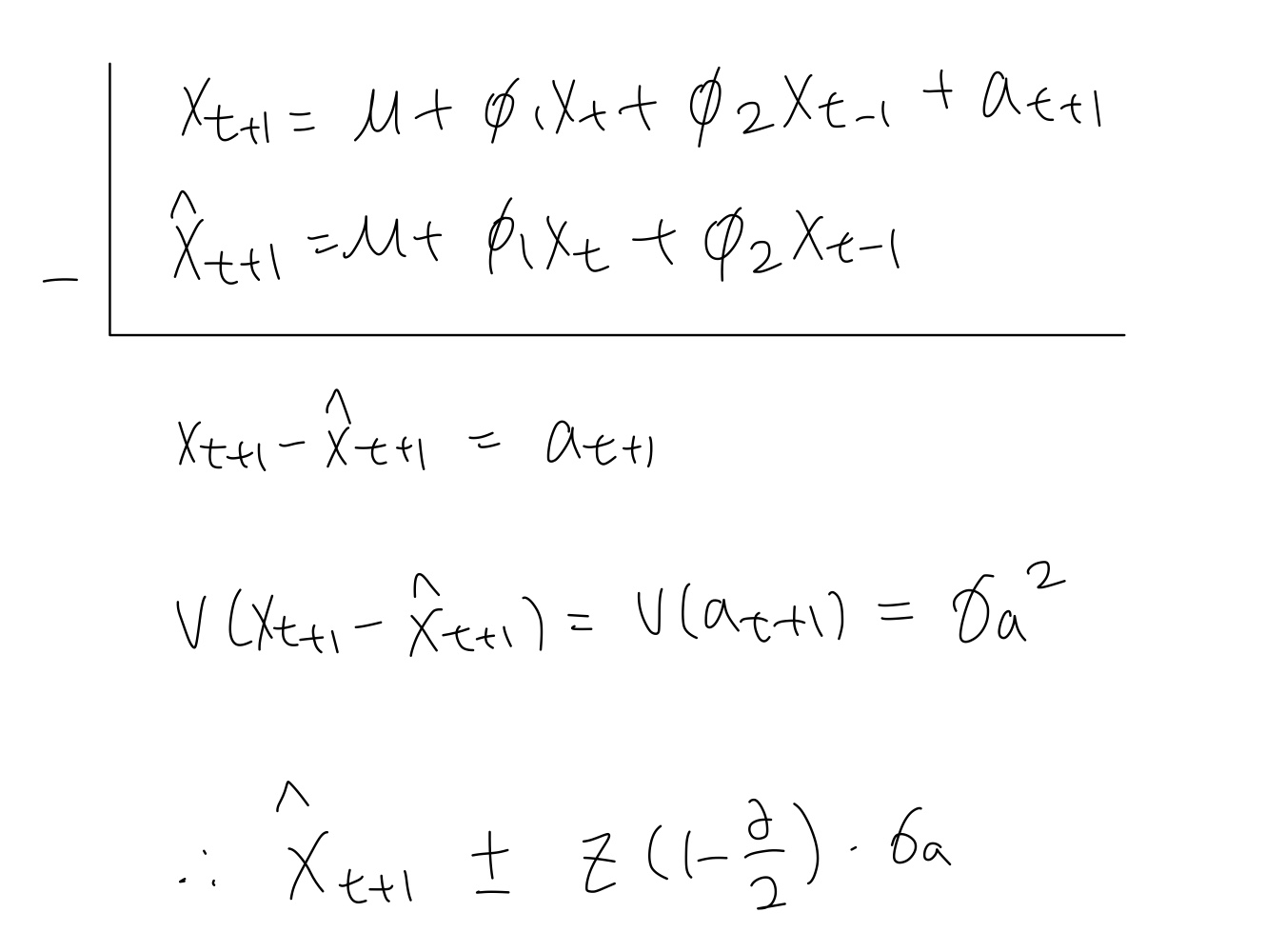
- prediction interval :
- point predicted value :
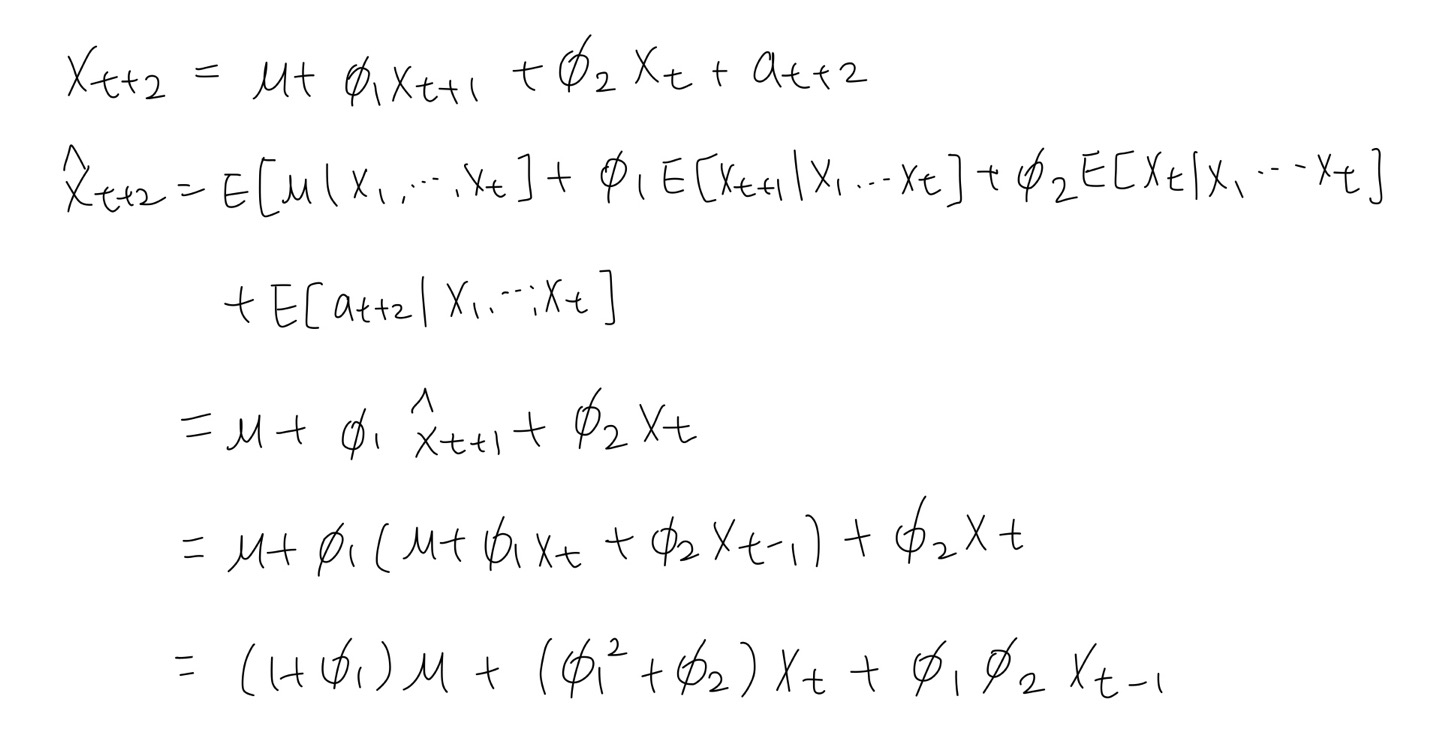
- prediction interval :

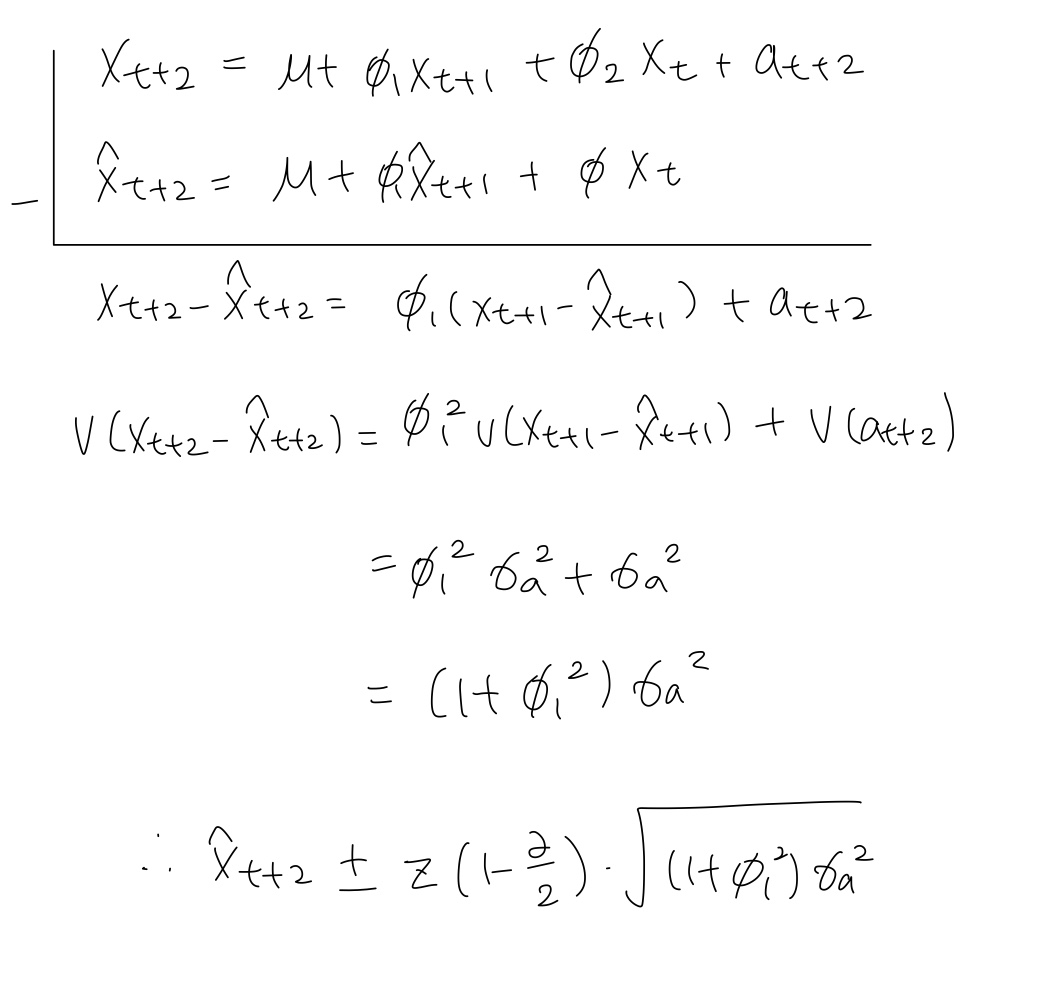
- point predicted value :

- prediction interval :

3. ARMA(1,1)
- point predicted value :
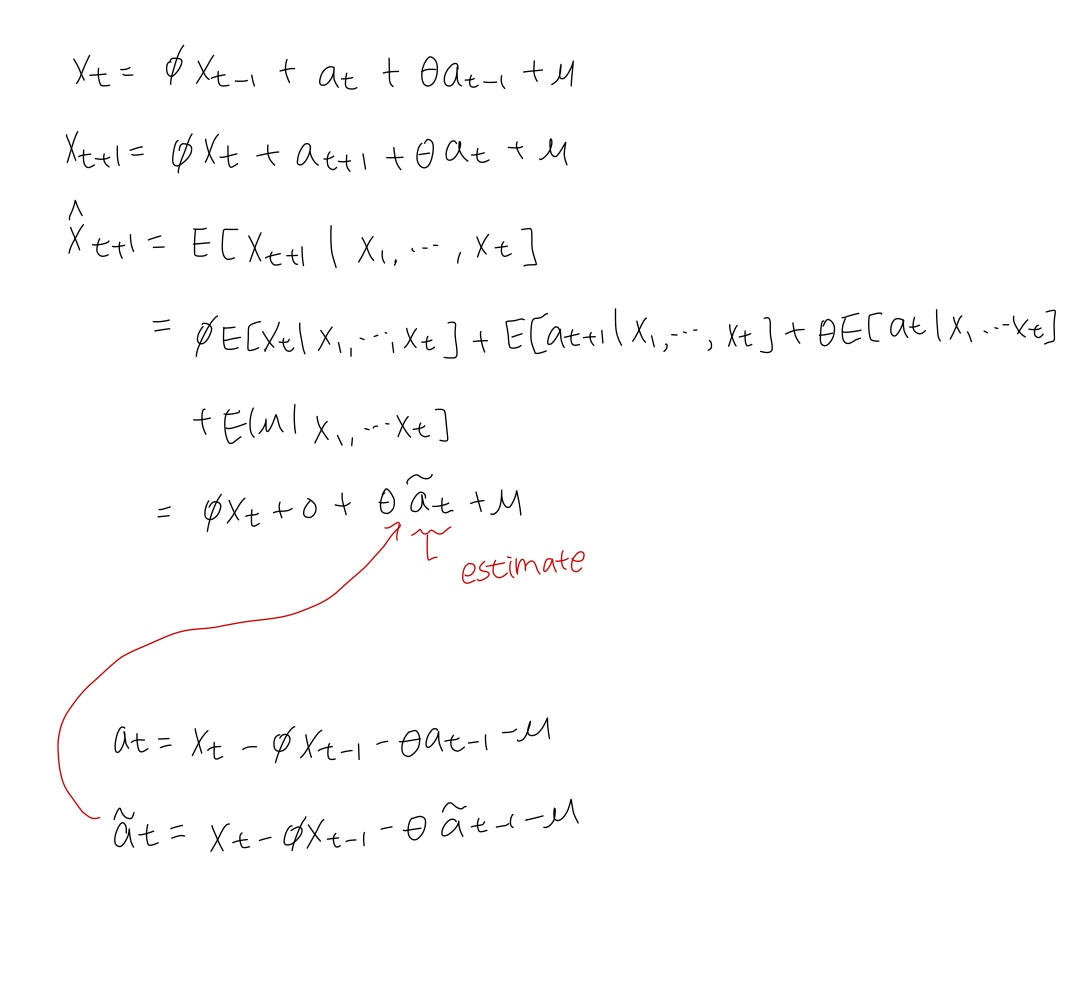
Q. ARMA(1,1)은 위에서 주어진

말고 다르게 표현할 수 있는데, 과연 어떻게 표현할 수 있을까?
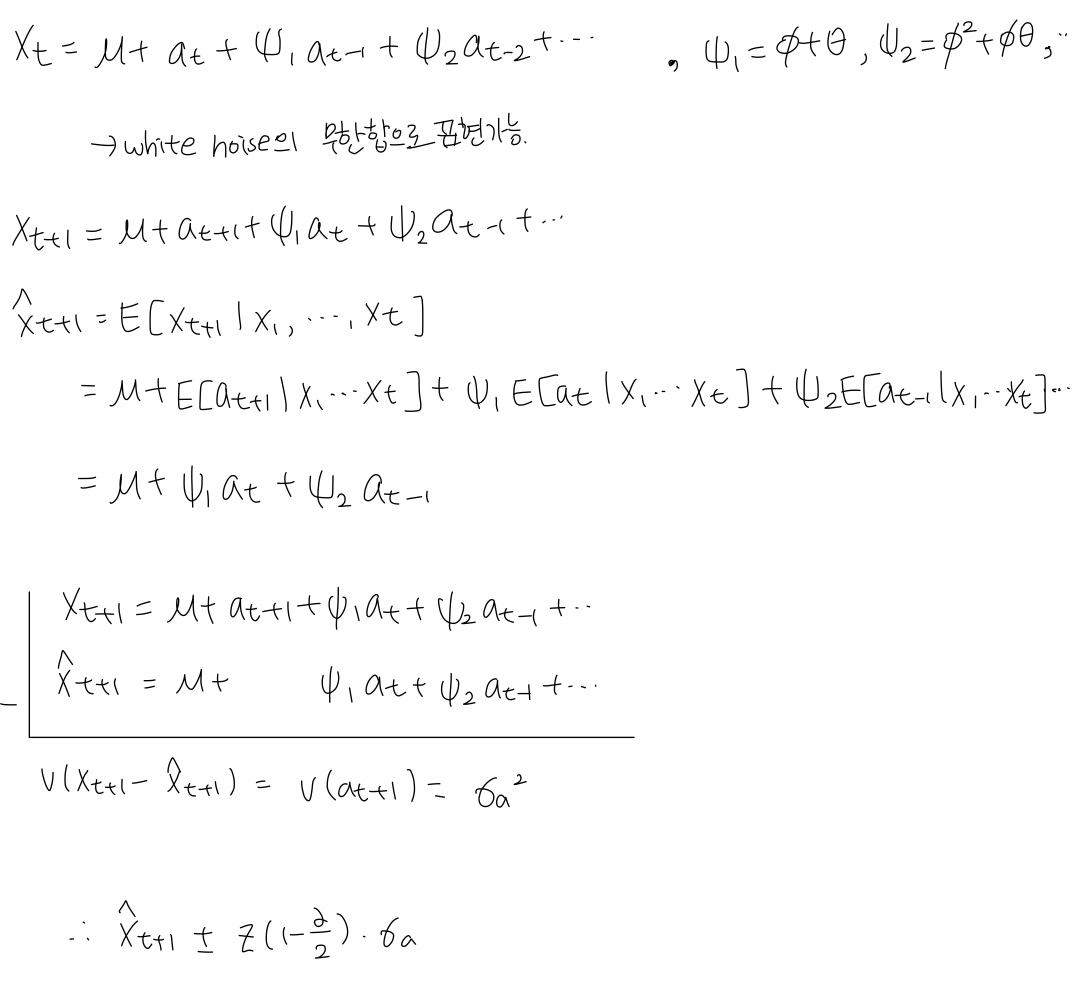
A. white noise의 무한합으로 표현 가능
- prediction interval :
Q. 위와 같이
A. 더 길어진다. 더 먼 미래를 예측하는 것이기 때문에 더 긴 구간으로 예측한다.
- (1-a)100% Prediction Interval for
=

- (1-a)100% Prediction Interval for
=

4. PACF(Partial autocorrelation function)

ACF에서 시차 사이에 낀 다른 시차의 영향력을 제거한 함수
- conditional function
- correlation between two variables under the assumption that we take into account the values of some other set of variables.
The partial correlation between Y and
The partial correlation between $X_{t} and X_{t-h}$

'심화 스터디 > 시계열' 카테고리의 다른 글
| [시계열 스터디] 코드리뷰(1) (0) | 2022.11.24 |
|---|---|
| [시계열 스터디] ARIMA 모델 part5 (0) | 2022.11.13 |
| [시계열] ARIMA 모델 - Part 4 (0) | 2022.11.03 |
| [시계열 스터디] ARIMA Model part3 (0) | 2022.10.09 |
| [시계열 스터디] ARIMA Model part2 (1) | 2022.09.25 |





댓글 영역